This contest is intended to lead toward the IEEE MicroMouse contest. We are using a maze drawn using black lines rather than walls to allow existing line following robots to enter a different type of contest.
| Quick reference | Quick answer |
|---|---|
| Code: | LMA |
| Control: | Autonomous |
| Open to: | All up to senior 4 |
| Playing field: | An 8 x 8 grid of 15 cm x 15 cm unit squares. The total size of the maze is therefore 1.2 m x 1.2 m. See the Playing Field section below for more detailed information. |
| Playing field surface: | The playing field is constructed from white Sintra(cellular PVC) with 18mm wide black lines encapsulated into the surface. For this year, there will be no walls as but they may be added in future years. There may be some slight irregularities where tiles meet. |
Competition Objectives
The robot’s task is to navigate from the start square to the home square by
following the line in the shortest possible time.
Timing will be done by stopwatch from the time the robot first starts to move until it reaches the home. Timing will stop as soon as the robot enters the home square. A 10 second time reduction bonus will be given if the robot detects the black area in the home square and reacts by turning three times.
Game Principles
The best time of three runs is considered the time for that robot.
Programming changes between runs are NOT permitted, neither is adding hints or other maze-specific data. Anything the robot learned by itself may be retained between runs. If the robot fails to complete the maze in 3 minutes, it will be awarded progress points by the Judge
Game Procedure
At the start of each run, the robot will be placed in the start unit square facing in the direction of the next unit square of the maze. With the judges permission, the driver starts the robot and the time it takes to reach the goal is recorded.
The judge may halt the run if either the maze or the robot is in danger of damage if the run continues. This will also be considered to be an unfinished run. Further runs by that robot will be at the judges discretion.
The third unit square will be regarded as a default line. Once the robot enters that square you are committed to let it go the full distance. Before that you may stop the robot up to two times without penalty to make very minor adjustments to the mechanics but not the programming
Playing field
An 8 x 8 grid of 15 cm x 15 cm unit squares. The total size of the maze is therefore 1.2 m x 1.2 m.
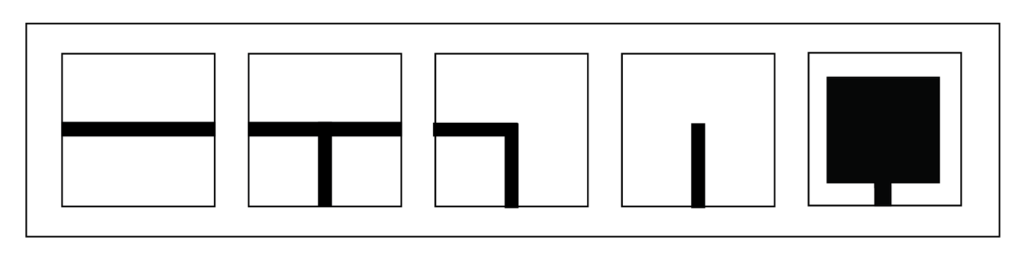
Each unit consists of one of five typical maze elements comprising;
- Straight line through entering and leaving two opposite sides
- A T-intersection entering and leaving three adjacent sides
- Single 90 degree bend entering and leaving two adjacent sides
- A dead end entering one side and continuing about 1/2 of the way across the square before ending
- The “home” unit with one entrance to a 10 cm x 10 cm black square in the centre.
- The start of the maze shall be on one of the four sides of the maze and shall be a straight line type unit square.
- The goal of the maze shall be a 10cm x 10cm black square. The robot should be able to detect that is has reached the goal and in doing so, indicate so by rotating 360° three times and stop.
- The maze will not have any intended changes in elevation and will sit on small, uniform-height supports.
- The maze will not be an island or loop style maze, and always-turn strategies will solve the maze but may not be an optimal solution
The typical mazes designs:
Robot Specifications
The robot shall be self-contained.
The length and width of the robot shall be restricted to a square region of 15 cm x 15 cm. The dimensions of a robot which changes its geometry during a run shall never be greater than 15 cm x 15 cm.
The height of the robot is unrestricted, but using vision capturing elements to
visualize the location of the “Home” and best route to it is not allowed.
Restrictions
No fuel cells or other combustion processes are permitted
If using Lithium based batteries, (See “MRG General Rules” for more information)
No “3pi” or similar robot kits, will be allowed. This competition is for home built robots that have been programmed by the builder or if the program was
downloaded from the internet we expect you to demonstrate how the code was extensively modified. We suggest you bring with you a printout of the code used and the original.
No leaving a trail of breadcrumbs or anything else in the robots wake.
Once the map is revealed, no further programming of the robot is permitted. Learning algorithms are permitted but the robot must discover the maze map by itself.
The robot must complete the entire maze by following the line at all times. If a robot loses the line but is able to regain it without avoiding any significant part of the maze it may continue at the judges option.
No scratching or other damage to the playing field is permitted.
No remote control of any kind are permitted. Once released the robot must be fully autonomous.
Must be powered entirely by electricity. Competitors may enter more than one
robot in this competition.
NOTE* We ask that all contestants submit a printed copy of the code your robot uses, or on a USB thumb drive, which will be returned to you. This is to help us refine the rules for next year and will NOT be shared. Please ensure your robot name is included in the title of your code.
Robot Identification
The MRG identification sticker(s) (as supplied during registration) must be easily readable on the robot’s body while the robot is in competition.
MRG General Rules:
Failure to follow the MRG General Rules may result in the following:
- Warning being issued, or
- Disqualification and loss of the round, or
- Disqualification from competition and or event
For full rules, please visit the MRG General Rules page.